Showing posts with label OpenCV. Show all posts
Showing posts with label OpenCV. Show all posts
Thursday, July 24, 2014
OpenCV Python: 2048 Game Solver
A sample application of Digit Recognition.
2048 solver algorithm based on term2048-AI
download: 2048opencv.py
demo video:
[フレーム]
==================================
update:
Solving the Android version of 2048..
Android phone is running a VNC server (vnc server & viewer are both slow!).
[フレーム]
python script: 2048opencv_adb.py
tip: send [touchscreen]swipe event through adb:
sources:
gabrielecirulli.github
diaryofatinker.blogspot
stackoverflow.com
2048 solver algorithm based on term2048-AI
import cv2 import numpy as np import win32api, win32gui, win32ui, win32con, win32com.client from PIL import Image, ImageFont, ImageDraw, ImageOps # create training model based on the given TTF font file # http://projectproto.blogspot.com/2014/07/opencv-python-digit-recognition.html def createDigitsModel(fontfile, digitheight): font = ImageFont.truetype(fontfile, digitheight) samples = np.empty((0,digitheight*(digitheight/2))) responses = [] for n in range(10): pil_im = Image.new("RGB", (digitheight, digitheight*2)) ImageDraw.Draw(pil_im).text((0, 0), str(n), font=font) pil_im = pil_im.crop(pil_im.getbbox()) pil_im = ImageOps.invert(pil_im) #pil_im.save(str(n) + ".png") # convert to cv image cv_image = cv2.cvtColor(np.array( pil_im ), cv2.COLOR_RGBA2BGRA) gray = cv2.cvtColor(cv_image, cv2.COLOR_BGR2GRAY) blur = cv2.GaussianBlur(gray,(5,5),0) thresh = cv2.adaptiveThreshold(blur,255,1,1,11,2) roi = cv2.resize(thresh,(digitheight,digitheight/2)) responses.append( n ) sample = roi.reshape((1,digitheight*(digitheight/2))) samples = np.append(samples,sample,0) samples = np.array(samples,np.float32) responses = np.array(responses,np.float32) model = cv2.KNearest() model.train(samples,responses) return model class Board(object): UP, DOWN, LEFT, RIGHT = 1, 2, 3, 4 FONT = "font/ClearSans-Bold.ttf" def __init__(self, clientwindowtitle): self.hwnd = self.getClientWindow(clientwindowtitle) if not self.hwnd: return self.hwndDC = win32gui.GetWindowDC(self.hwnd) self.mfcDC = win32ui.CreateDCFromHandle(self.hwndDC) self.saveDC = self.mfcDC.CreateCompatibleDC() self.cl, self.ct, right, bot = win32gui.GetClientRect(self.hwnd) self.cw, self.ch = right-self.cl, bot-self.ct self.cl += win32api.GetSystemMetrics(win32con.SM_CXSIZEFRAME) self.ct += win32api.GetSystemMetrics(win32con.SM_CYSIZEFRAME) self.ct += win32api.GetSystemMetrics(win32con.SM_CYCAPTION) self.ch += win32api.GetSystemMetrics(win32con.SM_CYSIZEFRAME)*2 self.saveBitMap = win32ui.CreateBitmap() self.saveBitMap.CreateCompatibleBitmap(self.mfcDC, self.cw, self.ch) self.saveDC.SelectObject(self.saveBitMap) self.tiles, self.tileheight, self.contour = self.findTiles(self.getClientFrame()) if not len(self.tiles): return self.digitheight = self.tileheight / 2 self.digitsmodel = createDigitsModel(self.FONT, self.digitheight) self.update() def getClientWindow(self, windowtitle): toplist, winlist = [], [] def enum_cb(hwnd, results): winlist.append((hwnd, win32gui.GetWindowText(hwnd))) win32gui.EnumWindows(enum_cb, toplist) window = [(hwnd, title) for hwnd, title in winlist if windowtitle.lower() in title.lower()] if not len(window): return 0 return window[0][0] def getClientFrame(self): self.saveDC.BitBlt((0, 0), (self.cw, self.ch), self.mfcDC, (self.cl, self.ct), win32con.SRCCOPY) bmpinfo = self.saveBitMap.GetInfo() bmpstr = self.saveBitMap.GetBitmapBits(True) pil_img = Image.frombuffer( 'RGB', (bmpinfo['bmWidth'], bmpinfo['bmHeight']), bmpstr, 'raw', 'BGRX', 0, 1) array = np.array( pil_img ) cvimage = cv2.cvtColor(array, cv2.COLOR_RGBA2BGRA) return cvimage def findTiles(self, cvframe): tiles, avgh = [], 0 gray = cv2.cvtColor(cvframe,cv2.COLOR_BGRA2GRAY) thresh = cv2.adaptiveThreshold(gray,255,1,1,11,2) contours, hierarchy = cv2.findContours(thresh.copy(), cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) def findBoard(contours): # get largest square ww, sqcnt = 10, None for cnt in contours: x,y,w,h = cv2.boundingRect(cnt) if w>ww and abs(w-h)<w/10: ww = w sqcnt = cnt return sqcnt board = findBoard(contours) if board==None: print 'board not found!' return tiles, avgh, board bx,by,bw,bh = cv2.boundingRect(board) #cv2.rectangle(cvframe,(bx,by),(bx+bw,by+bh),(0,255,0),2) #cv2.imshow('board',cvframe) #cv2.waitKey(0) #cv2.destroyWindow( 'board' ) maxh = bh/4 minh = (maxh*4)/5 count = 0 for contour in contours: x,y,w,h = cv2.boundingRect(contour) if y>by and w>minh and w<maxh and h>minh and h<maxh: avgh += h count += 1 if not count: print 'no tile found!' return tiles, avgh, board avgh = avgh / count margin = (bh-avgh*4)/5 for row in range(4): for col in range(4): x0 = bx + avgh*col + margin*(col+1) x1 = x0 + avgh y0 = by + avgh*row + margin*(row+1) y1 = y0 + avgh tiles.append([x0, y0, x1, y1]) #cv2.rectangle(cvframe,(x0,y0),(x1,y1),(0,255,0),2) #cv2.imshow('tiles',cvframe) #cv2.waitKey(0) #cv2.destroyWindow( 'tiles' ) return tiles, avgh, board def getTileThreshold(self, tileimage): gray = cv2.cvtColor(tileimage,cv2.COLOR_BGR2GRAY) row, col = gray.shape tmp = gray.copy().reshape(1, row*col) counts = np.bincount(tmp[0]) sort = np.sort(counts) modes, freqs = [], [] for i in range(len(sort)): freq = sort[-1-i] if freq < 4: break mode = np.where(counts==freq)[0][0] modes.append(mode) freqs.append(freq) bg, fg = modes[0], modes[0] for i in range(len(modes)): fg = modes[i] #if abs(bg-fg)>=48: if abs(bg-fg)>32 and abs(fg-150)>4: # 150?! break #print bg, fg if bg>fg: # needs dark background ? tmp = 255 - tmp bg, fg = 255-bg, 255-fg tmp = tmp.reshape(row, col) ret, thresh = cv2.threshold(tmp,(bg+fg)/2,255,cv2.THRESH_BINARY) return thresh def getTileNumbers(self, cvframe): numbers = [] outframe = np.zeros(cvframe.shape,np.uint8) def guessNumber(digits): for i in range(1,16): nn = 2**i ss = str(nn) dd = [int(c) for c in ss] if set(digits) == set(dd): return nn return 0 for tile in self.tiles: x0,y0,x1,y1 = tile tileimage = cvframe[y0:y1,x0:x1] cv2.rectangle(cvframe,(x0,y0),(x1,y1),(0,255,0),2) cv2.rectangle(outframe,(x0,y0),(x1,y1),(0,255,0),1) thresh = self.getTileThreshold(tileimage) contours,hierarchy = cv2.findContours(thresh.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE) dh = self.digitheight digits = [] for cnt in contours: x,y,w,h = cv2.boundingRect(cnt) if h>w and h>(dh*1)/5 and h<(dh*6)/5: cv2.rectangle(cvframe,(x0+x,y0+y),(x0+x+w,y0+y+h),(0,0,255),1) roi = thresh[y:y+h,x:x+w] roi = cv2.resize(roi,(dh,dh/2)) roi = roi.reshape((1,dh*(dh/2))) roi = np.float32(roi) retval, results, neigh_resp, dists = self.digitsmodel.find_nearest(roi, k=1) digit = int((results[0][0])) string = str(digit) digits.append(digit) cv2.putText(outframe,string,(x0+x,y0+y+h),0,float(h)/24,(0,255,0)) numbers.append(guessNumber(digits)) return numbers, outframe def getWindowHandle(self): return self.hwnd def getBoardContour(self): return self.contour def update(self): frame = self.getClientFrame() self.tilenumbers, outframe = self.getTileNumbers(frame) return self.tilenumbers, frame, outframe def copyTileNumbers(self): return self.tilenumbers[:] def getCell(self, tiles, x, y): return tiles[(y*4)+x] def setCell(self, tiles, x, y, v): tiles[(y*4)+x] = v return tiles def getCol(self, tiles, x): return [self.getCell(tiles, x, i) for i in range(4)] def setCol(self, tiles, x, col): for i in range(4): self.setCell(tiles, x, i, col[i]) return tiles def getLine(self, tiles, y): return [self.getCell(tiles, i, y) for i in range(4)] def setLine(self, tiles, y, line): for i in range(4): self.setCell(tiles, i, y, line[i]) return tiles def validMove(self, tilenumbers, direction): if direction == self.UP or direction == self.DOWN: for x in range(4): col = self.getCol(tilenumbers, x) for y in range(4): if(y < 4-1 and col[y] == col[y+1] and col[y]!=0): return True if(direction == self.DOWN and y > 0 and col[y] == 0 and col[y-1]!=0): return True if(direction == self.UP and y < 4-1 and col[y] == 0 and col[y+1]!=0): return True if direction == self.LEFT or direction == self.RIGHT: for y in range(4): line = self.getLine(tilenumbers, y) for x in range(4): if(x < 4-1 and line[x] == line[x+1] and line[x]!=0): return True if(direction == self.RIGHT and x > 0 and line[x] == 0 and line[x-1]!=0): return True if(direction == self.LEFT and x < 4-1 and line[x] == 0 and line[x+1]!=0): return True return False def moveTileNumbers(self, tilenumbers, direction): def collapseline(line, direction): if (direction==self.LEFT or direction==self.UP): inc = 1 rg = xrange(0, 4-1, inc) else: inc = -1 rg = xrange(4-1, 0, inc) pts = 0 for i in rg: if line[i] == 0: continue if line[i] == line[i+inc]: v = line[i]*2 line[i] = v line[i+inc] = 0 pts += v return line, pts def moveline(line, directsion): nl = [c for c in line if c != 0] if directsion==self.UP or directsion==self.LEFT: return nl + [0] * (4 - len(nl)) return [0] * (4 - len(nl)) + nl score = 0 if direction==self.LEFT or direction==self.RIGHT: for i in range(4): origin = self.getLine(tilenumbers, i) line = moveline(origin, direction) collapsed, pts = collapseline(line, direction) new = moveline(collapsed, direction) tilenumbers = self.setLine(tilenumbers, i, new) score += pts elif direction==self.UP or direction==self.DOWN: for i in range(4): origin = self.getCol(tilenumbers, i) line = moveline(origin, direction) collapsed, pts = collapseline(line, direction) new = moveline(collapsed, direction) tilenumbers = self.setCol(tilenumbers, i, new) score += pts return score, tilenumbers # AI based on "term2048-AI" # https://github.com/Nicola17/term2048-AI class AI(object): def __init__(self, board): self.board = board def nextMove(self): tilenumbers = self.board.copyTileNumbers() m, s = self.nextMoveRecur(tilenumbers[:],3,3) return m def nextMoveRecur(self, tilenumbers, depth, maxDepth, base=0.9): bestMove, bestScore = 0, -1 for m in range(1,5): if(self.board.validMove(tilenumbers, m)): score, newtiles = self.board.moveTileNumbers(tilenumbers[:], m) score, critical = self.evaluate(newtiles) newtiles = self.board.setCell(newtiles,critical[0],critical[1],2) if depth != 0: my_m,my_s = self.nextMoveRecur(newtiles[:],depth-1,maxDepth) score += my_s*pow(base,maxDepth-depth+1) if(score > bestScore): bestMove = m bestScore = score return bestMove, bestScore def evaluate(self, tilenumbers, commonRatio=0.25): maxVal = 0. criticalTile = (-1, -1) for i in range(8): linearWeightedVal = 0 invert = False if i<4 else True weight = 1. ctile = (-1,-1) cond = i%4 for y in range(4): for x in range(4): if cond==0: b_x = 4-1-x if invert else x b_y = y elif cond==1: b_x = x b_y = 4-1-y if invert else y elif cond==2: b_x = 4-1-x if invert else x b_y = 4-1-y elif cond==3: b_x = 4-1-x b_y = 4-1-y if invert else y currVal=self.board.getCell(tilenumbers,b_x,b_y) if(currVal == 0 and ctile == (-1,-1)): ctile = (b_x,b_y) linearWeightedVal += currVal*weight weight *= commonRatio invert = not invert if linearWeightedVal > maxVal: maxVal = linearWeightedVal criticalTile = ctile return maxVal, criticalTile def solveBoard(self, moveinterval=500): boardHWND = self.board.getWindowHandle() if not boardHWND: return False bx, by, bw, bh = cv2.boundingRect(self.board.getBoardContour()) x0, x1, y0, y1 = bx, bx+bw, by, by+bh win32gui.SetForegroundWindow(boardHWND) shell = win32com.client.Dispatch('WScript.Shell') print 'Set the focus to the Game Window, and the press this arrow key:' keymove = ['UP', 'DOWN', 'LEFT', 'RIGHT'] delay = moveinterval / 3 # milliseconds delay to cancel board animation effect prev_numbers = [] while True: numbers, inframe, outframe = self.board.update() if numbers != prev_numbers: cv2.waitKey(delay) numbers, inframe, outframe = self.board.update() if numbers == prev_numbers: # recheck if has changed continue prev_numbers = numbers move = ai.nextMove() if move: key = keymove[move-1] shell.SendKeys('{%s}'%key) print key cv2.waitKey(delay) cv2.imshow('CV copy',inframe[y0:y1,x0:x1]) cv2.imshow('CV out', outframe[y0:y1,x0:x1]) cv2.waitKey(delay) cv2.destroyWindow( 'CV copy' ) cv2.destroyWindow( 'CV out' ) # http://gabrielecirulli.github.io/2048/ # http://ov3y.github.io/2048-AI/ board = Board("2048 - Google Chrome") #board = Board("2048 - Mozilla Firefox") ai = AI(board) ai.solveBoard(360) print 'stopped.'
{kind=link}
# open this site with Chrome: http://gabrielecirulli.github.io/2048/ board = Board("2048 - Google Chrome") ai = AI(board) ai.solveBoard()
{kind=link}
{kind=link}
demo video:
[フレーム]
==================================
update:
Solving the Android version of 2048..
Android phone is running a VNC server (vnc server & viewer are both slow!).
[フレーム]
python script: 2048opencv_adb.py
tip: send [touchscreen]swipe event through adb:
adb shell input swipe x1 y1 x2 y2
sources:
gabrielecirulli.github
diaryofatinker.blogspot
stackoverflow.com
Monday, July 21, 2014
OpenCV Python: Digit Recognition
Here's an example of OpenCV digit recognition with a given TrueType font (*.ttf) and digit height. It uses python PIL module to load digit glyphs. These glyphs (converted to CV images) are then used to train a K-Nearest model.
download: digitrecognition.py
sources:
opencvpython.blogspot.com
stackoverflow.com
import cv2 import numpy as np from PIL import Image, ImageFont, ImageDraw, ImageOps # create training model based on the given TTF font file def createDigitsModel(fontfile, digitheight): ttfont = ImageFont.truetype(fontfile, digitheight) samples = np.empty((0,digitheight*(digitheight/2))) responses = [] for n in range(10): pil_im = Image.new("RGB", (digitheight, digitheight*2)) ImageDraw.Draw(pil_im).text((0, 0), str(n), font=ttfont) pil_im = pil_im.crop(pil_im.getbbox()) pil_im = ImageOps.invert(pil_im) #pil_im.save(str(n) + ".png") # convert to cv image cv_image = cv2.cvtColor(np.array( pil_im ), cv2.COLOR_RGBA2BGRA) gray = cv2.cvtColor(cv_image, cv2.COLOR_BGR2GRAY) blur = cv2.GaussianBlur(gray,(5,5),0) thresh = cv2.adaptiveThreshold(blur,255,1,1,11,2) roi = cv2.resize(thresh,(digitheight,digitheight/2)) responses.append( n ) sample = roi.reshape((1,digitheight*(digitheight/2))) samples = np.append(samples,sample,0) samples = np.array(samples,np.float32) responses = np.array(responses,np.float32) model = cv2.KNearest() model.train(samples,responses) return model # digit recognition part def findDigits(imagefile, digitheight, fontfile="C:\\Windows\\Fonts\\Arial.ttf"): im = cv2.imread(imagefile) out = np.zeros(im.shape,np.uint8) gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY) thresh = cv2.adaptiveThreshold(gray,255,1,1,11,2) contours,hierarchy = cv2.findContours(thresh.copy(),cv2.RETR_EXTERNAL ,cv2.CHAIN_APPROX_SIMPLE) model = createDigitsModel(fontfile, digitheight) for cnt in contours: x,y,w,h = cv2.boundingRect(cnt) if h>w and h>(digitheight*4)/5 and h<(digitheight*6)/5: #+/-20% cv2.rectangle(im,(x,y),(x+w,y+h),(0,255,0),1) roi = thresh[y:y+h,x:x+w] # crop roi = cv2.resize(roi,(digitheight,digitheight/2)) roi = roi.reshape((1,digitheight*(digitheight/2))) roi = np.float32(roi) retval, results, neigh_resp, dists = model.find_nearest(roi, k=1) string = str(int((results[0][0]))) #cv2.drawContours(out,[cnt],-1,(0,255,255),1) cv2.putText(out,string,(x,y+h),0,1,(0,255,0)) cv2.imshow('in',im) cv2.imshow('out',out) cv2.waitKey(0) cv2.destroyWindow( 'in' ) cv2.destroyWindow( 'out' ) findDigits('pi.png', 32) print 'done.'
sources:
opencvpython.blogspot.com
stackoverflow.com
Sunday, June 2, 2013
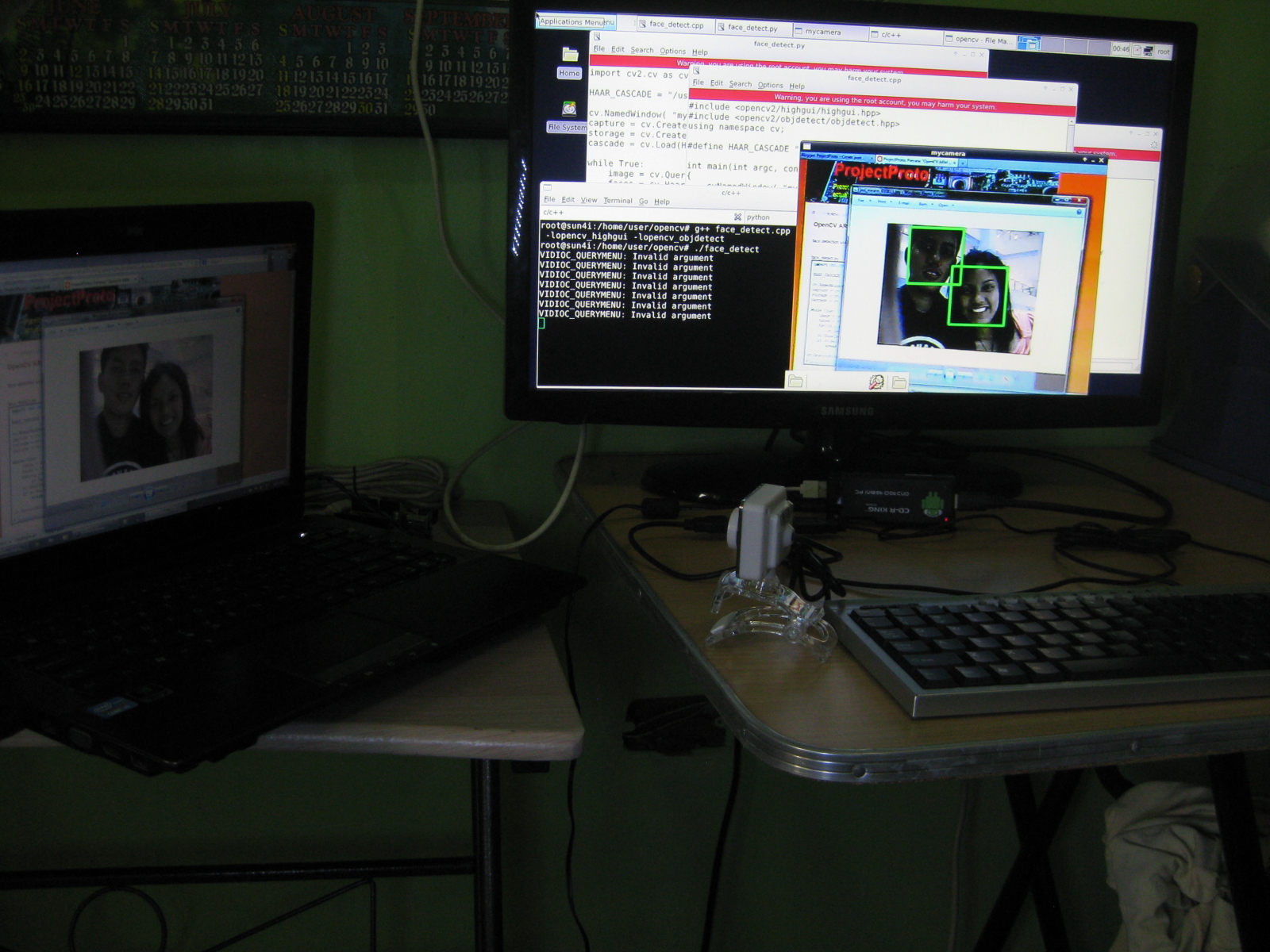
OpenCV ARM - Face Detect
Here's another application that uses opencv libraries in the Debian disto. It performs face detection using Haar cascade.
{kind=link}
The code below continuously captures frames with a USB web-camera. (In this demo, I displayed a sample picture on a separate laptop but this will also work for actual faces). Using the input frames and a loaded Haar classifier cascade, vector of rectangles containing the detected faces is returned to the user. A bounding box is drawn to each face to show successful detection.
face_detect.py
import cv2.cv as cv HAAR_CASCADE = "/usr/local/share/OpenCV/haarcascades/haarcascade_frontalface_default.xml" cv.NamedWindow( "mycamera" ) capture = cv.CreateCameraCapture(0) storage = cv.CreateMemStorage() cascade = cv.Load(HAAR_CASCADE) while True: image = cv.QueryFrame(capture) faces = cv.HaarDetectObjects(image, cascade, storage, 1.1, 3, cv.CV_HAAR_DO_CANNY_PRUNING, (100,100)) for((x,y,w,h),i) in faces: cv.Rectangle(image, (x,y), (x+w, y+h), (0,255,0), 3) cv.ShowImage( "mycamera", image ) if cv.WaitKey(5) > 0: break cv.DestroyWindow( "mycamera" )
{kind=link}
Below is the C/C++ equivalent of the above python script. (The code appears lengthy due to the comments and cleanup routines.)
face_detect.cpp
#include <opencv2/highgui/highgui.hpp> #include <opencv2/objdetect/objdetect.hpp> using namespace cv; #define HAAR_CASCADE "/usr/local/share/OpenCV/haarcascades/haarcascade_frontalface_default.xml" int main(int argc, const char ** argv) { cvNamedWindow( "mycamera" /*, CV_WINDOW_AUTOSIZE*/); // create camera window, 1=CV_WINDOW_AUTOSIZE(default,the user cannot resize the window) CvCapture *capture = cvCreateCameraCapture(0); // start capturing frames from camera (i.e. /dev/video0 device) CvMemStorage *storage = cvCreateMemStorage(); // create new memory storage CvHaarClassifierCascade *cascade = (CvHaarClassifierCascade *)cvLoad(HAAR_CASCADE); // load frontal face detector while (1){ IplImage *image = cvQueryFrame(capture); // grab and retrieve frame CvSeq *faces = cvHaarDetectObjects(image, cascade, storage, 1.1, 3, CV_HAAR_DO_CANNY_PRUNING, cvSize(100,100)); // find rectangular regions that contain faces for(int i=0; i < faces->total; i++){ CvRect *r = (CvRect *)cvGetSeqElem(faces, i); // get bounding rectangle of the detected face cvRectangle(image, cvPoint(r->x, r->y), cvPoint(r->x + r->width, r->y + r->height), cvScalar(0,255,0), 3); // draw a green rectangle } cvShowImage( "mycamera", image ); // display image within window if (cvWaitKey(5) > 0) // press any key to exit break; } // cleanups cvReleaseHaarClassifierCascade( &cascade ); // release cascade cvReleaseMemStorage( &storage ); // release memory storage cvReleaseCapture( &capture ); // stop capturing/reading cvDestroyWindow( "mycamera" ); // end camera window return 0; }
Saturday, June 1, 2013
OpenCV ARM - Hello World
Here is a sample application that utilizes OpenCV in my customized Debian disto. Sample codes are posted below. The demo simply displays images captured by the camera. This can be extended to utilize other opencv functions.
{kind=link}
hello_camera.py
{kind=link}
import cv2.cv as cv cv.NamedWindow( "mycamera", 1 ) capture = cv.CreateCameraCapture( 0 ) while True: img = cv.QueryFrame( capture ) cv.ShowImage( "mycamera", img ) if cv.WaitKey(20) > 0: break cv.DestroyWindow( "mycamera" )
Below is the C/C++ equivalent of the above Python script.
hello_camera.cpp
{kind=link}
#include <opencv2/highgui/highgui.hpp> using namespace cv; int main( int argc, const char** argv ) { cvNamedWindow( "mycamera", 1 ); // create camera window CvCapture *capture = cvCreateCameraCapture( 0 ); // start capturing frames from camera (i.e. /dev/video0 device) while(1){ IplImage* img = cvQueryFrame( capture ); // grab and retrieve frame cvShowImage( "mycamera", img ); // display image within window if( waitKey(20) > 0 ) // press any key to exit (interval=20ms) break; } // cleanups cvReleaseCapture( &capture ); // stop capturing/reading // not needed in python (?) cvDestroyWindow( "mycamera" ); // end camera window return 0; }
---------------------------------------------------------------------------
- thanks to hilite.me for formating the codes. (best viewed with Firefox browser)
- webcam can also be tested with guvcview (Applications Menu->Multimedia->guvcview)
Subscribe to:
Comments (Atom)