I have simple code. The library downloaded from github:smarmengol/Modbus-Master-Slave-for-Arduino.
I wanted to store floating point. In the code blow, I type casted to integer value. As I know uint16_t au16data[30]; is integer
#include <avr/wdt.h>
#include"glob.h"
#define ID 1
int8_t state = 0;
Modbus slave(ID, 0, 0);
unsigned long tempus;
// data array for modbus network sharing
uint16_t au16data[30];
void Take_Reading()
{
for(row=0;row<9;row++)
{
int k=(8*array[row][0]+4*array[row][1]+2*array[row][2]+1*array[row][3]);
digitalWrite(Enablepin,array[row][0]);
digitalWrite(SO_enable,array[row][1]);
digitalWrite(S1_enable,array[row][2]);
digitalWrite(S2_enable,array[row][3]);
//delay(100);
Sensor_Value0=analogRead(A0);
Sensor_Value1=analogRead(A5);
Mux1_array[row]=(Sensor_Value0 * ARDUINO_ANALOG_SCALING);
Mux2_array[row]=(Sensor_Value1 * ARDUINO_ANALOG_SCALING);
Current_Value1[row]= (Mux1_array[row]*40)-98;
Current_Value2[row]= (Mux2_array[row]*40)-98;
}
}
void setup()
{
wdt_enable(WDTO_8S);
slave.begin( 9600 );
tempus = millis() + 100;
pinMode(3,OUTPUT);
pinMode(SO_enable, OUTPUT) ;// pin can enable/disable using digital IO 7 of arduino
pinMode(S1_enable, OUTPUT) ;// pin can enable/disable using digital IO 6 of arduino
pinMode(S2_enable, OUTPUT) ;// pin can enable/disable using digital IO 5 of arduino
pinMode(Enablepin, OUTPUT) ;// pin can enable/disable using digital IO 4 of arduino
pinMode(A0, INPUT) ;
pinMode(A5, INPUT) ;
// Serial.begin(9600);
}
void loop()
{
digitalWrite(3,HIGH);
// wdt_reset();
Take_Reading();
state = slave.poll( au16data,30 );
if (state > 4) {
tempus = millis() + 50;
digitalWrite(13, HIGH);
}
if (millis() > tempus) digitalWrite(13, LOW );
Modbus_call();
}
void Modbus_call()
{
/*reading of coil where i can succefully read value*/
au16data[0]=(int)Current_Value1[0];
au16data[1]=(int)Current_Value1[1];
au16data[2]=(int)Current_Value1[2];
au16data[3]=(int)Current_Value1[3];
au16data[4]=(int)Current_Value1[4];
au16data[5]=(int)Current_Value1[5];
au16data[6]=(int)Current_Value1[6];
au16data[7]=(int)Current_Value1[7];
au16data[8]=(int)Current_Value1[8];
au16data[9]=(int)Current_Value2[0];
au16data[10]=(int)Current_Value2[1];
au16data[11]=(int)Current_Value2[2];
au16data[12]=(int)Current_Value2[3];
au16data[16]=(int)Current_Value2[4];
au16data[17]=(int)Current_Value2[5];
au16data[18]=(int)Current_Value2[6];
au16data[19]=(int)Current_Value2[7];
uint16_t calcCRC( au16data[15]);
au16data[13] = slave.getInCnt();
au16data[14] = slave.getOutCnt();
au16data[15] = slave.getErrCnt();
}
Conversion method as below.
CS=30.10
Int_CS=int(CS)
FLOAT_CS=(Int_CS-CS)*100
How to store the Int_CS & FLOAT_CS values in au16data[0]??
I have change code accordingly.
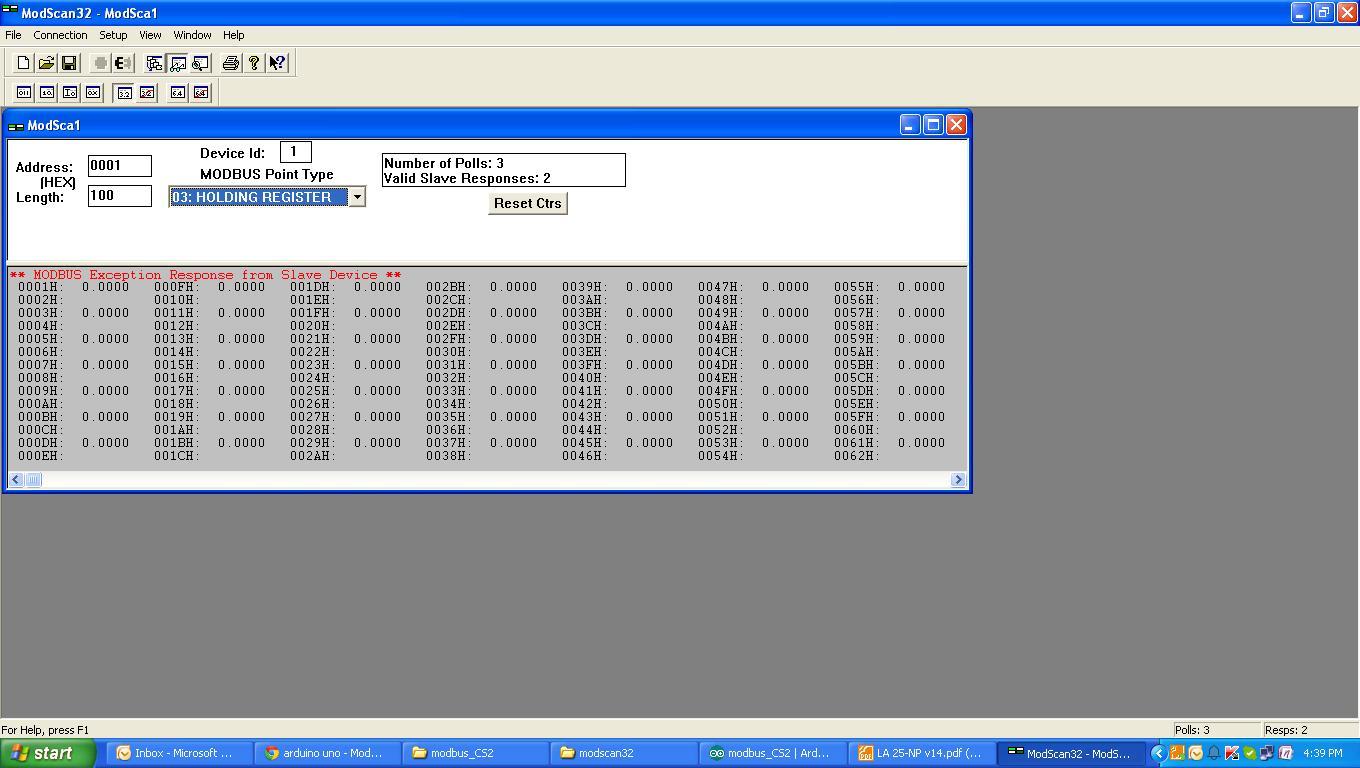{kind=link}
But I get zero. After some time its values don't even show
#include <avr/wdt.h>
#include"glob.h"
#define ID 1
int8_t state = 0;
Modbus slave(ID, 0, 0);
unsigned long tempus;
// data array for modbus network sharing
uint16_t au16data[5];
float auFloatData[30];
void Take_Reading()
{
for(row=0;row<9;row++)
{
int k=(8*array[row][0]+4*array[row][1]+2*array[row][2]+1*array[row][3]);
digitalWrite(Enablepin,array[row][0]);
digitalWrite(SO_enable,array[row][1]);
digitalWrite(S1_enable,array[row][2]);
digitalWrite(S2_enable,array[row][3]);
//delay(100);
Sensor_Value0=analogRead(A0);
Sensor_Value1=analogRead(A5);
Mux1_array[row]=(Sensor_Value0 * ARDUINO_ANALOG_SCALING);
Mux2_array[row]=(Sensor_Value1 * ARDUINO_ANALOG_SCALING);
Current_Value1[row]= (Mux1_array[row]*40)-98;
Current_Value2[row]= (Mux2_array[row]*40)-98;
}
}
void setup()
{
wdt_enable(WDTO_8S);
slave.begin( 9600 );
tempus = millis() + 100;
pinMode(3,OUTPUT);
pinMode(SO_enable, OUTPUT) ;// pin can enable/disable using digital IO 7 of arduino
pinMode(S1_enable, OUTPUT) ;// pin can enable/disable using digital IO 6 of arduino
pinMode(S2_enable, OUTPUT) ;// pin can enable/disable using digital IO 5 of arduino
pinMode(Enablepin, OUTPUT) ;// pin can enable/disable using digital IO 4 of arduino
pinMode(A0, INPUT) ;
pinMode(A5, INPUT) ;
// Serial.begin(9600);
}
void loop()
{
digitalWrite(3,HIGH);
// wdt_reset();
Take_Reading();
state = slave.poll( au16data,5 );
if (state > 4) {
tempus = millis() + 50;
digitalWrite(13, HIGH);
}
if (millis() > tempus) digitalWrite(13, LOW );
Modbus_call();
}
void Modbus_call()
{
/*reading of coil where i can succefully read value*/
auFloatData[20]=Current_Value1[0];
auFloatData[21]=Current_Value1[1];
auFloatData[22]=Current_Value1[3];
auFloatData[4]=Current_Value1[4];
auFloatData[5]=Current_Value1[5];
auFloatData[6]=Current_Value1[6];
auFloatData[7]=Current_Value1[7];
auFloatData[8]=Current_Value1[8];
auFloatData[9]=Current_Value2[0];
auFloatData[10]=Current_Value2[1];
auFloatData[11]=Current_Value2[2];
auFloatData[12]=Current_Value2[3];
auFloatData[16]=Current_Value2[4];
auFloatData[17]=Current_Value2[5];
auFloatData[18]=Current_Value2[6];
auFloatData[19]=Current_Value2[7];
uint16_t calcCRC( au16data[3]);
au16data[1] = slave.getInCnt();
au16data[2] = slave.getOutCnt();
au16data[3] = slave.getErrCnt();
}
1 Answer 1
- Sizes
Integer Types (int, long and long long)
Size of Boolean type is 1 byte(s)
Number of bits in a character: 8 Size of character types is 1 byte Signed char min: -128 max: 127 Unsigned char min: 0 max: 255 Default char is unsigned
Size of short int types is 2 bytes Signed short min: -32768 max: 32767 Unsigned short min: 0 max: 65535
Size of int types is 4 bytes Signed int min: -2147483648 max: 2147483647 Unsigned int min: 0 max: 4294967295
Size of long int types is 4 bytes Signed long min: -2147483648 max: 2147483647 Unsigned long min: 0 max: 4294967295
Size of long long types is 8 bytes Signed long long min: -9223372036854775808 max: 9223372036854775807 Unsigned long long min: 0 max: 18446744073709551615 Note that int and long are the same size and if you want a 64 bit integer then you need to use long long (or unsigned long long).
- What do you want to achieve with
.
CS=30.10 // 30.10
Int_CS=int(CS) // 30
FLOAT_CS = (Int_CS-CS)*100 //-10.00 because 30 - 30.10 = -0.1 and -0.1 * 100 = -10.00
CS is already float, why you want to convert it to int and back to float? If value of int is higher than 255 you have to save it in 2 bytes(highByte and lowByte), float is 32bit(4bytes) value.
I think you have to do like this:
float CS = 30.10;
au16data[0]= (int)(CS*100);//3010.00 > 3010
And for better way use :
float auFloatData[30]; //
...
auFloatData[0]=Current_Value1[0];
-
Minor correction: Default char is signed in gcc (compiler shipped with arduino). You can pass -funsigned-char compiler flag to have unsigned as default.user2973– user29732014年10月31日 09:20:21 +00:00Commented Oct 31, 2014 at 9:20
-
@Martynas But i have already tried that.when then it zero at end it print only 301 not 3010. SO it will difficult to recognize .when it turns out 3 digit value.AMPS– AMPS2014年10月31日 10:10:27 +00:00Commented Oct 31, 2014 at 10:10
-
@AMPS What is the range of CS?Martynas– Martynas2014年10月31日 10:23:29 +00:00Commented Oct 31, 2014 at 10:23
-
it measure 0~25 A , for understanding i given example above.AMPS– AMPS2014年10月31日 10:31:24 +00:00Commented Oct 31, 2014 at 10:31
-
What accuracy do you need?Martynas– Martynas2014年10月31日 10:34:00 +00:00Commented Oct 31, 2014 at 10:34
uint16_t x =CS*100it will store 3010. When extracting from uint to float float y = (float)x/100.