{kind=link}
Introductory Circuit Analysis (13th Edition)
Introductory Circuit Analysis (13th Edition)
13th Edition
ISBN: 9780133923605
Author: Robert L. Boylestad
Publisher: PEARSON
expand_more
expand_more
format_list_bulleted
Bartleby Related Questions Icon
Related questions
Question
{kind=link}
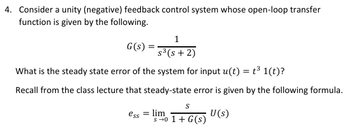
Transcribed Image Text:4. Consider a unity (negative) feedback control system whose open-loop transfer
function is given by the following.
1
G(s):
s3 (s + 2)
What is the steady state error of the system for input u(t) = t3 1(t)?
Recall from the class lecture that steady-state error is given by the following formula.
S
ess = lim
S-01 + G(s)
U(s)
Expert Solution
Check MarkThis question has been solved!
Explore an expertly crafted, step-by-step solution for a thorough understanding of key concepts.
bartleby
Step by stepSolved in 2 steps with 1 images
{kind=link}
Knowledge Booster
Background pattern image
Similar questions
- Given the following feedback system, a. Find the System type b. Find the value of the static error constants c. Find the value of K to have an steady-state error of 0.01 R(s) + E(s) C(s) K 1 s(2ドル+5s+6) Sarrow_forward29. The unity feedback system of Figure P7.1, where G(s) = K(s+a) s(s+ B) to Juqni ns Tol botoqxs 75 14. 9190 ST Jor Wa is to be designed to meet the following require- lo ments: The steady-state position error for a unit ramp input equals 1/10; the closed-loop poles will be located at -1 ± jl. Find K, a, and ß in order to meet Jinu onu O SIL 10 1 UST OB-DA the specifications. [Section: 7.4]arrow_forwardhand solution and Matlab. if its possible can any one post a command list for matlab for control?arrow_forward
- Feedback and Control Systems Write the general form of, and determine the exact response of the capacitor voltage for the electrical network shown below. R1 = 10 kQ ww R2 = 10 ks C= 10 pF v(t)=u(t) L=200 H 0000arrow_forwardConsider the feedback system. It is known that G(s) has one unstable zero and one unstable pole. On the G(s)-plane -1+j0 point is encircled one time in the clockwise direction as s moves in the clockwise direction on the Nyquist path. What can be said about the closed-loop system? a. Stable O b. C. e. Of. G(s) Has 1 unstable pole Od. Has 2 unstable poles and 1 stable zero Has 1 unstable pole and 1 unstable zero Has 2 unstable poles and 2 unstable zeros Has 2 unstable poles and 1 ustable zero None g.arrow_forwardThe control system G(s) = Kp / s (s+2) (s+6) has a unity feedback a. Kp is variable, discuss stability by using Routh Hurwitz method. Mark the poles ofthe system on root-locus curve below. b. When Kp = 26.7 , roots of the characteristic equation becomes s1= -0.6-1.89i, s2= -0.6+1.89i and s3= -6.8. Are you happy about this case? How do you evaluate,why ? c. How the root locus and step response would be effected by adding a controller Gc= Kp ( s + 0.5)2/ s . Give a comment about the addition of Gc on root locus andon step response.arrow_forward
- - 6. The unity feedback system shown in Figure P9.1 with K(s+6) G(s) (s+2)(s + 3)(s + 5) is operating with a dominant-pole damping ratio of 0.707. Design a PD controller so that the settling time is reduced by a factor of 2. Compare the transient and steady-state performance of the uncompensated and compensated systems. Describe any problems with your design. [Section: 9.3]arrow_forward8nnarrow_forward5. Consider following feedback system. R(s) + 100 S+4 +1 Find the steady-state error for (i) step input and (ii) ramp input.arrow_forward
- The unity feedback system with open loop transfer function G(s) K S2 is to be designed to have closed loop poles at -2.4 + j4.16. If the compensator's zero is placed at -1, do the following: a) Find the compensator pole b) Find the system gain c) Find the location of the third pole. d) Evaluate the steady-state error characteristic. e) Plot the step response of the compensated systemarrow_forwardControlarrow_forwardFor the open-loop system G(s) = 3/s^2 + 2s - 3 assume there is a feedback with a proportional gain, K. And sketch a locus of closed-loop rootsverse K. What is the minimum value of K to achievea stable system?arrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
- Text book imageIntroductory Circuit Analysis (13th Edition)Electrical EngineeringISBN:9780133923605Author:Robert L. BoylestadPublisher:PEARSONText book imageDelmar's Standard Textbook Of ElectricityElectrical EngineeringISBN:9781337900348Author:Stephen L. HermanPublisher:Cengage LearningText book imageProgrammable Logic ControllersElectrical EngineeringISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
- Text book imageFundamentals of Electric CircuitsElectrical EngineeringISBN:9780078028229Author:Charles K Alexander, Matthew SadikuPublisher:McGraw-Hill EducationText book imageElectric Circuits. (11th Edition)Electrical EngineeringISBN:9780134746968Author:James W. Nilsson, Susan RiedelPublisher:PEARSONText book imageEngineering ElectromagneticsElectrical EngineeringISBN:9780078028151Author:Hayt, William H. (william Hart), Jr, BUCK, John A.Publisher:Mcgraw-hill Education,
Text book image
Introductory Circuit Analysis (13th Edition)
Electrical Engineering
ISBN:9780133923605
Author:Robert L. Boylestad
Publisher:PEARSON
Text book image
Delmar's Standard Textbook Of Electricity
Electrical Engineering
ISBN:9781337900348
Author:Stephen L. Herman
Publisher:Cengage Learning
Text book image
Programmable Logic Controllers
Electrical Engineering
ISBN:9780073373843
Author:Frank D. Petruzella
Publisher:McGraw-Hill Education
Text book image
Fundamentals of Electric Circuits
Electrical Engineering
ISBN:9780078028229
Author:Charles K Alexander, Matthew Sadiku
Publisher:McGraw-Hill Education
Text book image
Electric Circuits. (11th Edition)
Electrical Engineering
ISBN:9780134746968
Author:James W. Nilsson, Susan Riedel
Publisher:PEARSON
Text book image
Engineering Electromagnetics
Electrical Engineering
ISBN:9780078028151
Author:Hayt, William H. (william Hart), Jr, BUCK, John A.
Publisher:Mcgraw-hill Education,